- 第 2 章 舵机与舵回路:
- 2.1 舵机的工作原理:
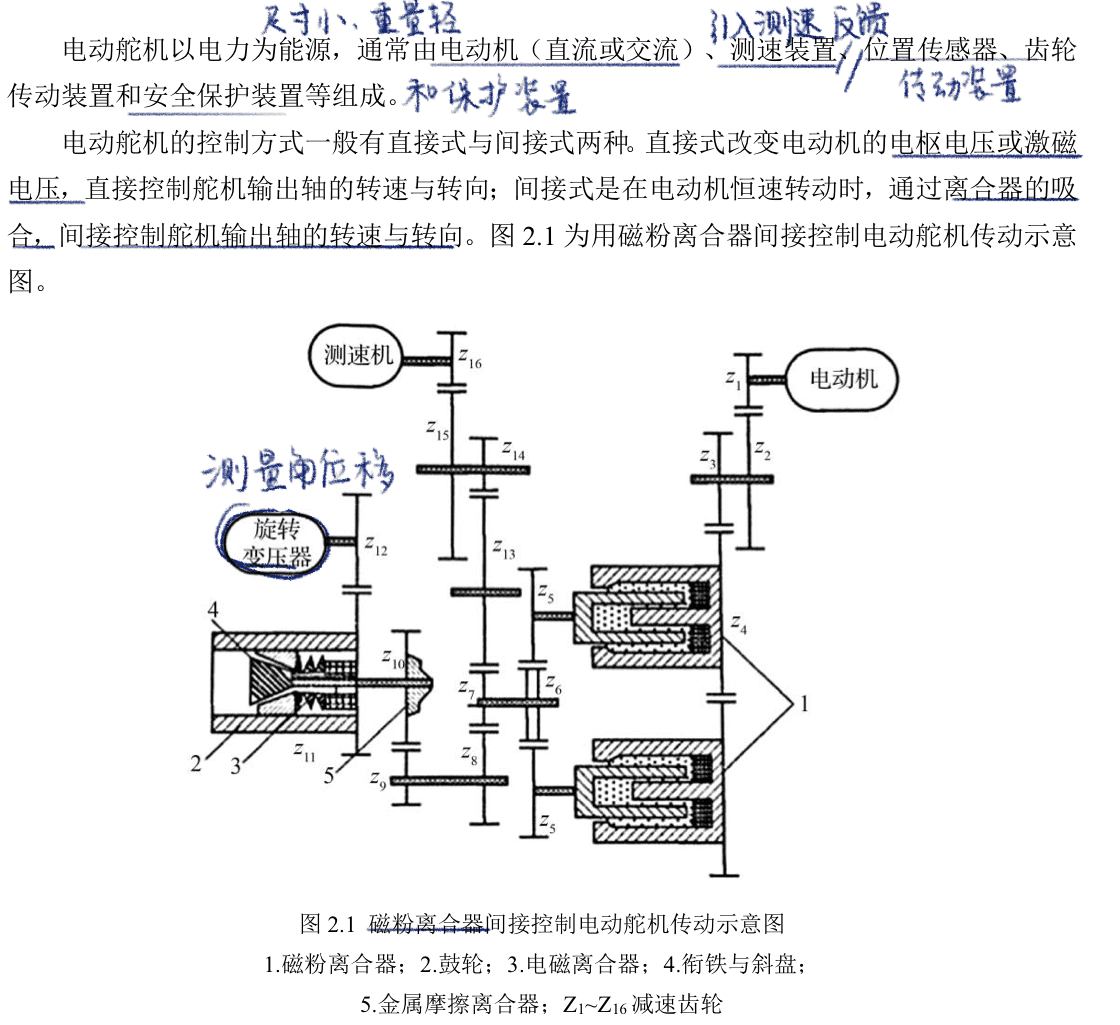
- 2.1.1 电动舵机:
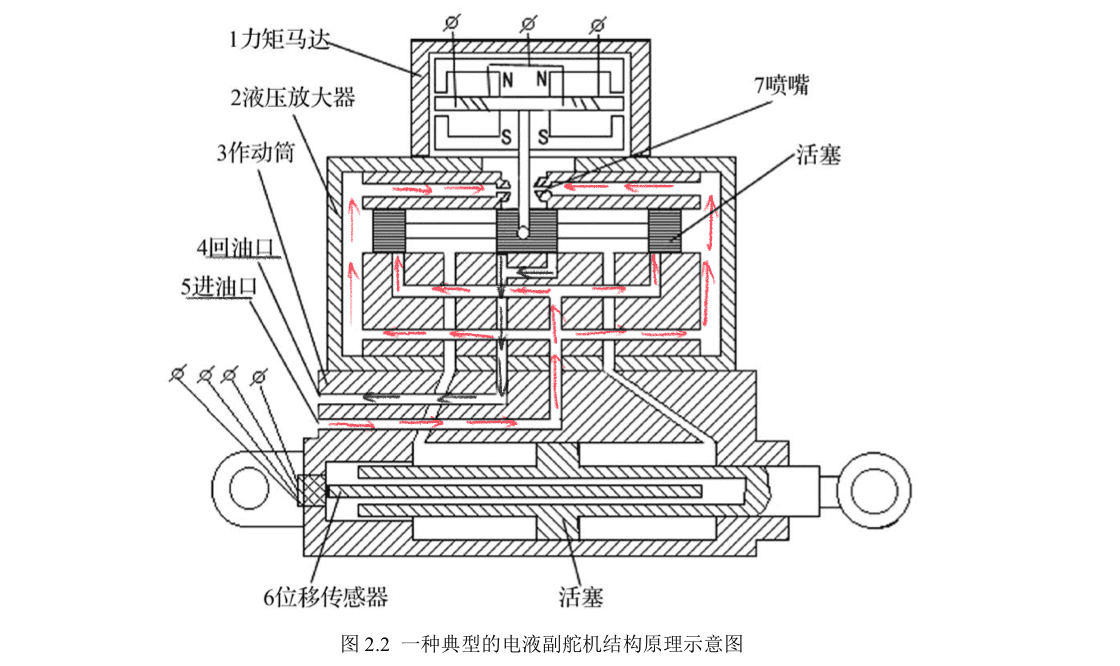
- 2.1.2 液压舵机:
- 2.2 舵面负载及其对舵机工作的影响:
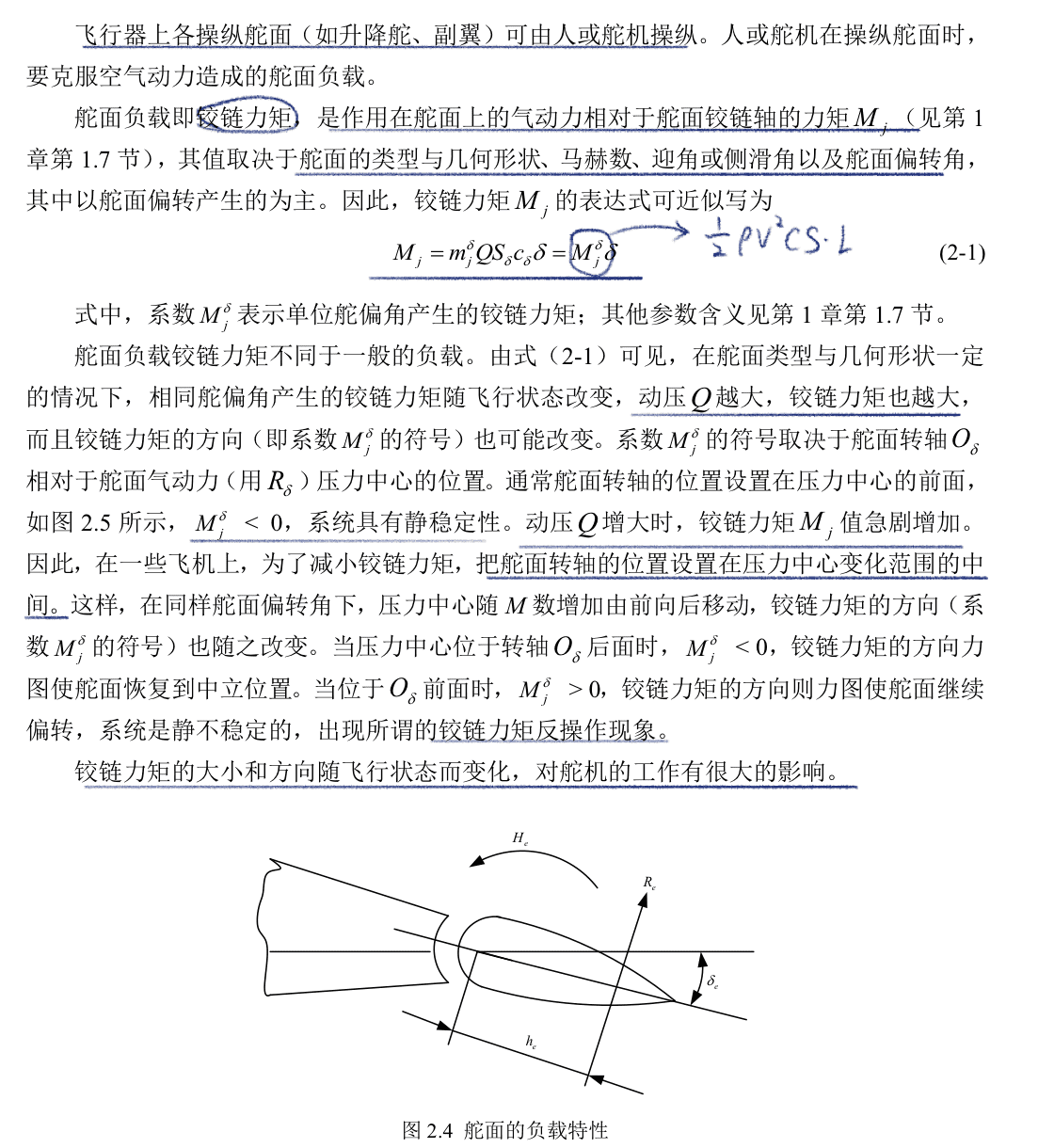
- 2.2.1 舵面的负载特性:
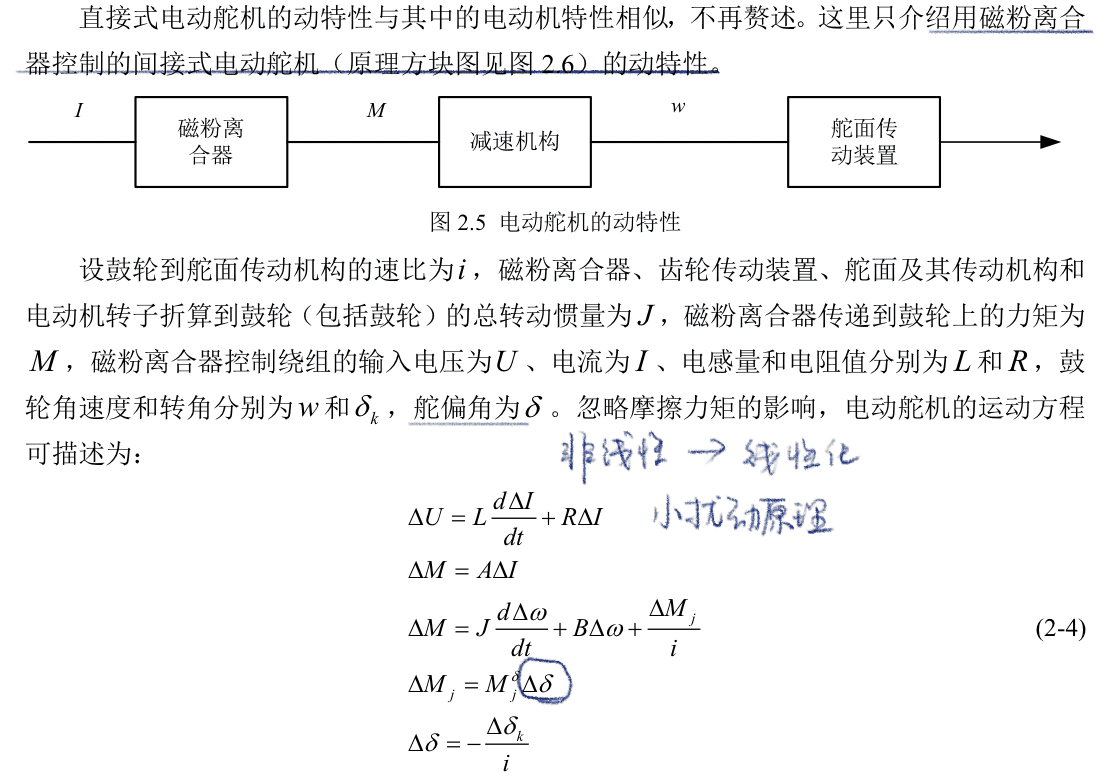
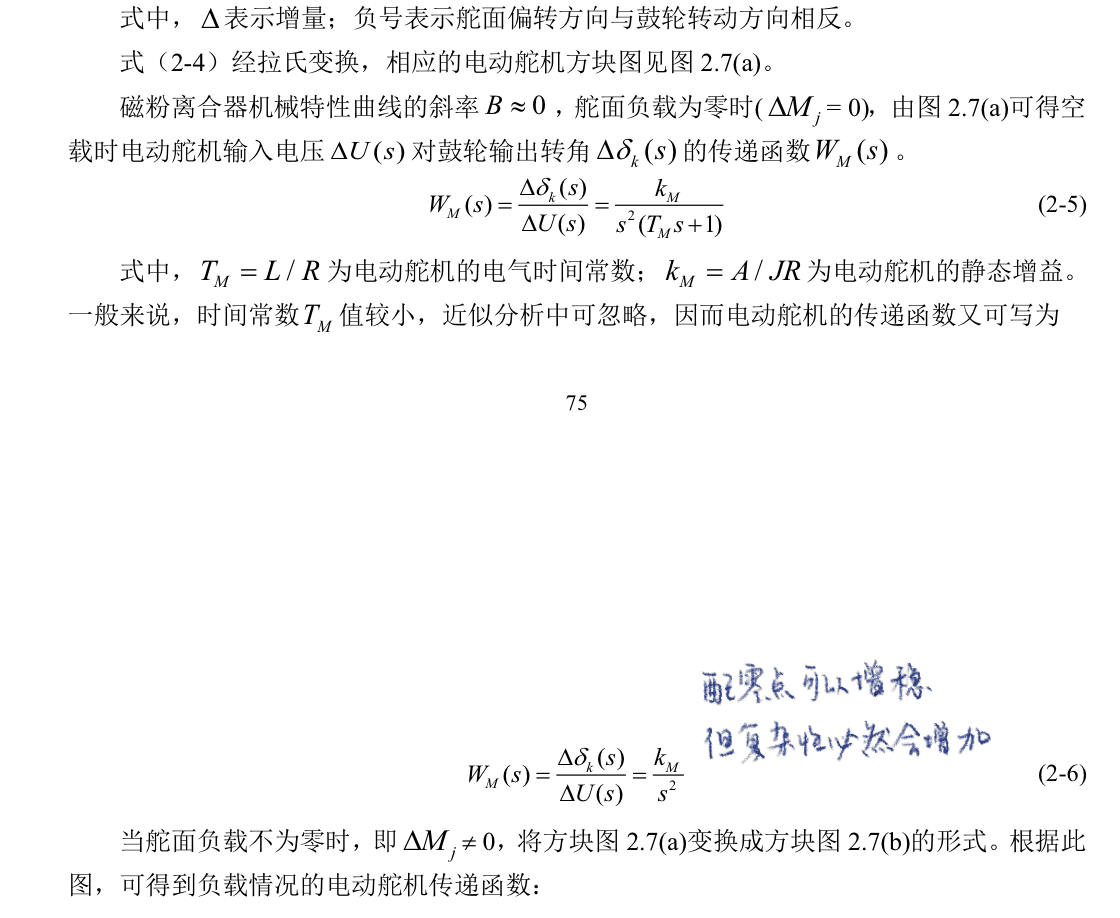
- 2.2.2 电动舵机的动特性:
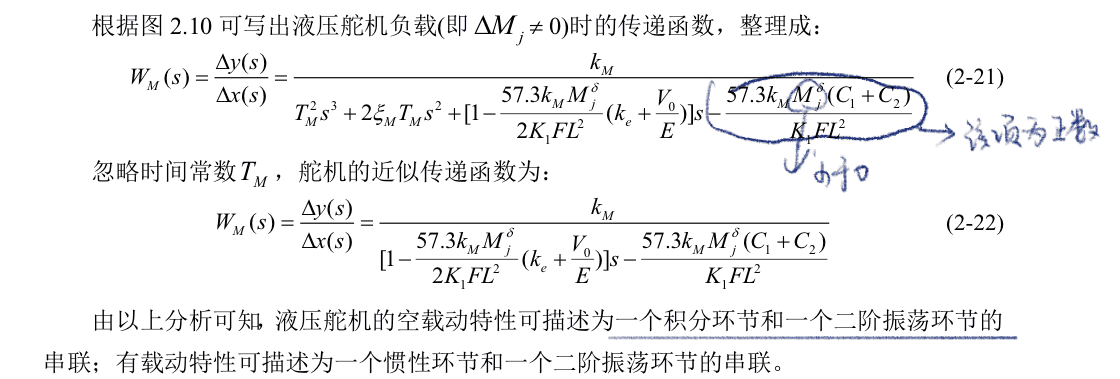
- 2.2.3 液压舵机的动特性:
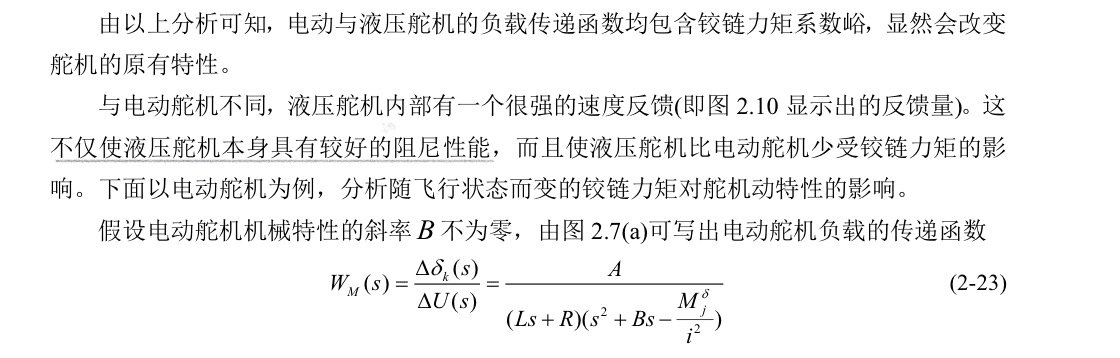
- 2.2.4 铰链力矩对舵机动特性的影响:
- 2.3 舵回路的基本类型及特点:
- 2.3.1 舵回路的构成:
- 2.3.2 舵回路的基本类型:
- 2.4 舵机特性对舵回路的影响:
- 2.4.1 舵机功率对舵回路的影响:
- 2.4.2 舵机传动机构间隙对舵回路的影响:
第 2 章 舵机与舵回路
2.1 舵机的工作原理

2.1.1 电动舵机
2.1.2 液压舵机
2.2 舵面负载及其对舵机工作的影响

2.2.1 舵面的负载特性
2.2.2 电动舵机的动特性
2.2.3 液压舵机的动特性
2.2.4 铰链力矩对舵机动特性的影响
2.3 舵回路的基本类型及特点
2.3.1 舵回路的构成
2.3.2 舵回路的基本类型

2.4 舵机特性对舵回路的影响
实际舵回路中的舵机功率有限,并有间隙饱和等非线性因素,本节讨论舵机特性对舵机回路工作的影响。
2.4.1 舵机功率对舵回路的影响
即在一定飞行状态下,最大舵偏角正比于舵机的最大输出力矩,与舵回路的输入无关。 在负载情况下,舵机的功率影响舵回路的静特性,其线性范围随舵机功率减小而变窄。
可见,当输入幅值 m U 为常值时,鼓轮偏角的幅值仅与舵回路频率特性有关,是角频率 的函数。给定不同输入电压幅值,按式(2-37)可分别画出图 2.12 所示舵回路输出(即鼓轮偏角)随角频率 变化的对数频率特性曲线(见图 2.19)。图 2.19 中的曲线 1、2、3 和 4 是在输入电压 1 m U 、2 m U 、3 m U 和 4 m U 作用下输出偏角幅频特性曲线,分别对应的稳态输出偏角 k =2.5o、5o、10o 和 15o。由图可见,在输入幅值一定时,鼓轮转角 k 随角频率变化。角频率一定时, k 随输入电压幅值增加而增大。还可看出,舵回路的通频带(即图中 b )与输入电压的幅值无关。 由图可见,舵机功率一定时,输入电压越大,舵回路的动态响应越慢;输入一定时,舵机功率越大,动态响应越快。 综上所述,舵机功率对舵回路的工作有很大影响。负载情况下,舵回路静态性的线性范围随舵机功率增加而增大;输入一定情况下,舵回路的通频带随舵机功率增大,动态响应加快。因此,在选用舵机时,应考虑其功率对舵回路的影响。
2.4.2 舵机传动机构间隙对舵回路的影响
舵机的机械传动机构中的间隙具有非线性特性。在舵机设计中,虽然总是力图使连接件紧密配合 , 间隙仍是不可能完全消除 , 对舵回路影响很大 , 严重时 , 舵回路将不能正常工作。
由以上可知,间隙对舵回路的工作影响很大,间隙所在的位置不同,对舵回路的影响也不同。反馈回路中的传动间隙影响尤为严重,会增大舵回路的延迟时间,增大静差,降低舵回路的稳定性,引起舵回路的输出在零值附近持续振荡(极限环),严重时,舵回路将无法正常工作 。 为了减小反馈回路中的传动间隙 , 避免舵回路振荡 , 在电动舵机内采用了双片齿轮。